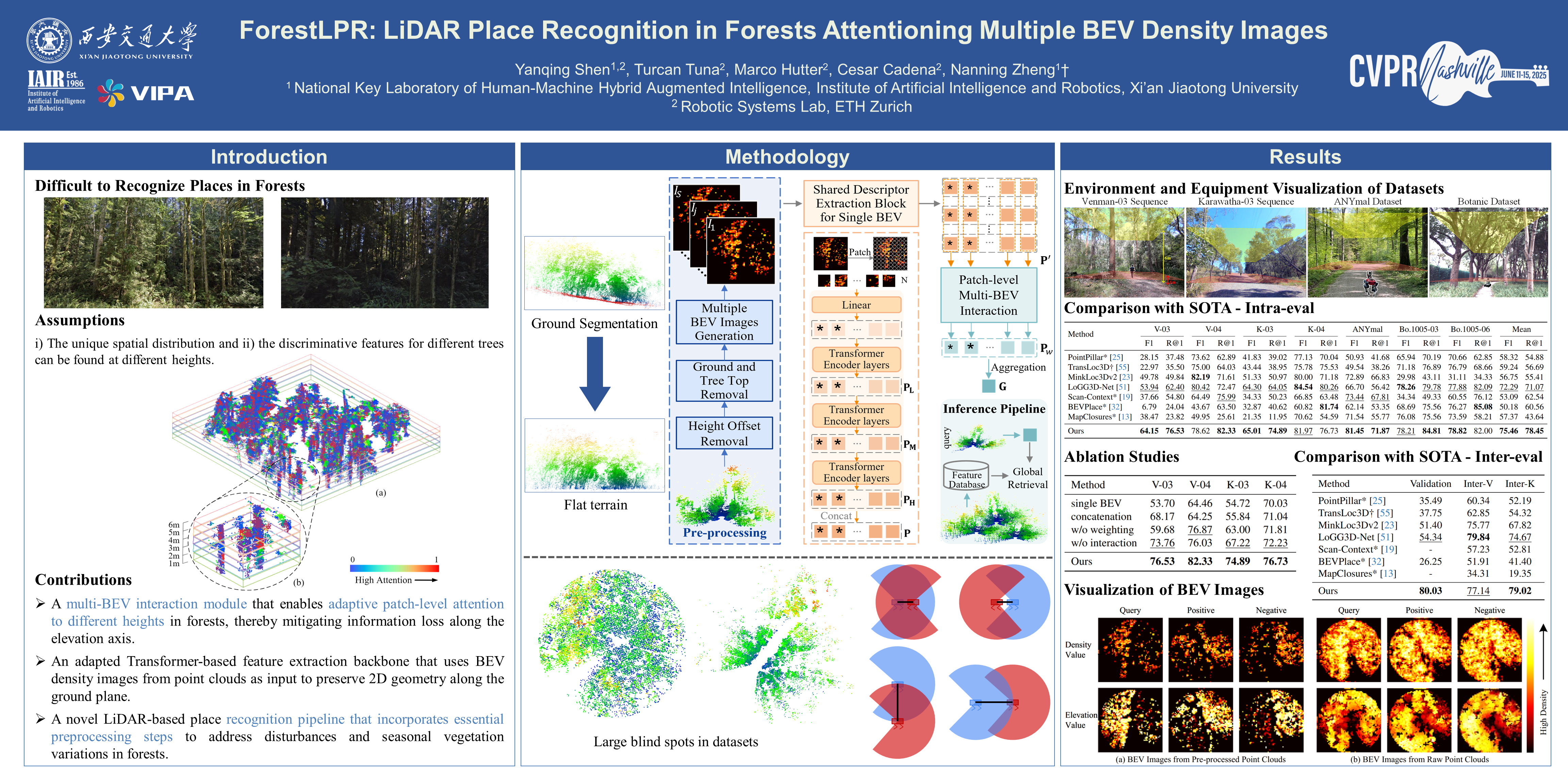
ForestLPR: LiDAR Place Recognition in Forests Attentioning Multiple BEV Density Images
 Highlight
Highlight
{kind=link}
Abstract
Place recognition is essential to maintain global consistency in large-scale localization systems. While research in urban environments has progressed significantly using LiDARs or cameras, applications in natural forest-like environments remain largely underexplored.Furthermore, forests present particular challenges due to high self-similarity and substantial variations in vegetation growth over time.In this work, we propose a robust LiDAR-based place recognition method for natural forests, ForestLPR. We hypothesize that a set of cross-sectional images of the forest’s geometry at different heights contains the information needed to recognize revisiting a place.The cross-sectional images are represented by bird’s-eye view (BEV) density images of horizontal slices of the point cloud at different heights. Our approach utilizes a visual transformer as the shared backbone to produce sets of local descriptors and introduces a multi-BEV interaction module to attend to information at different heights adaptively. It is followed by an aggregation layer that produces a rotation-invariant place descriptor. We evaluated the efficacy of our method extensively on real-world data from public benchmarks as well as robotic datasets and compared it against the state-of-the-art (SOTA) methods. The results indicate that ForestLPR has consistently good performance on all evaluations and achieves an average increase of 7.38\% and 9.11\% on Recall@1 over the closest competitor on intra-sequence loop closure detection and inter-sequence re-localization, respectively, validating our hypothesis.