GPVK-VL: Geometry-Preserving Virtual Keyframes for Visual Localization under Large Viewpoint Changes
{kind=link}
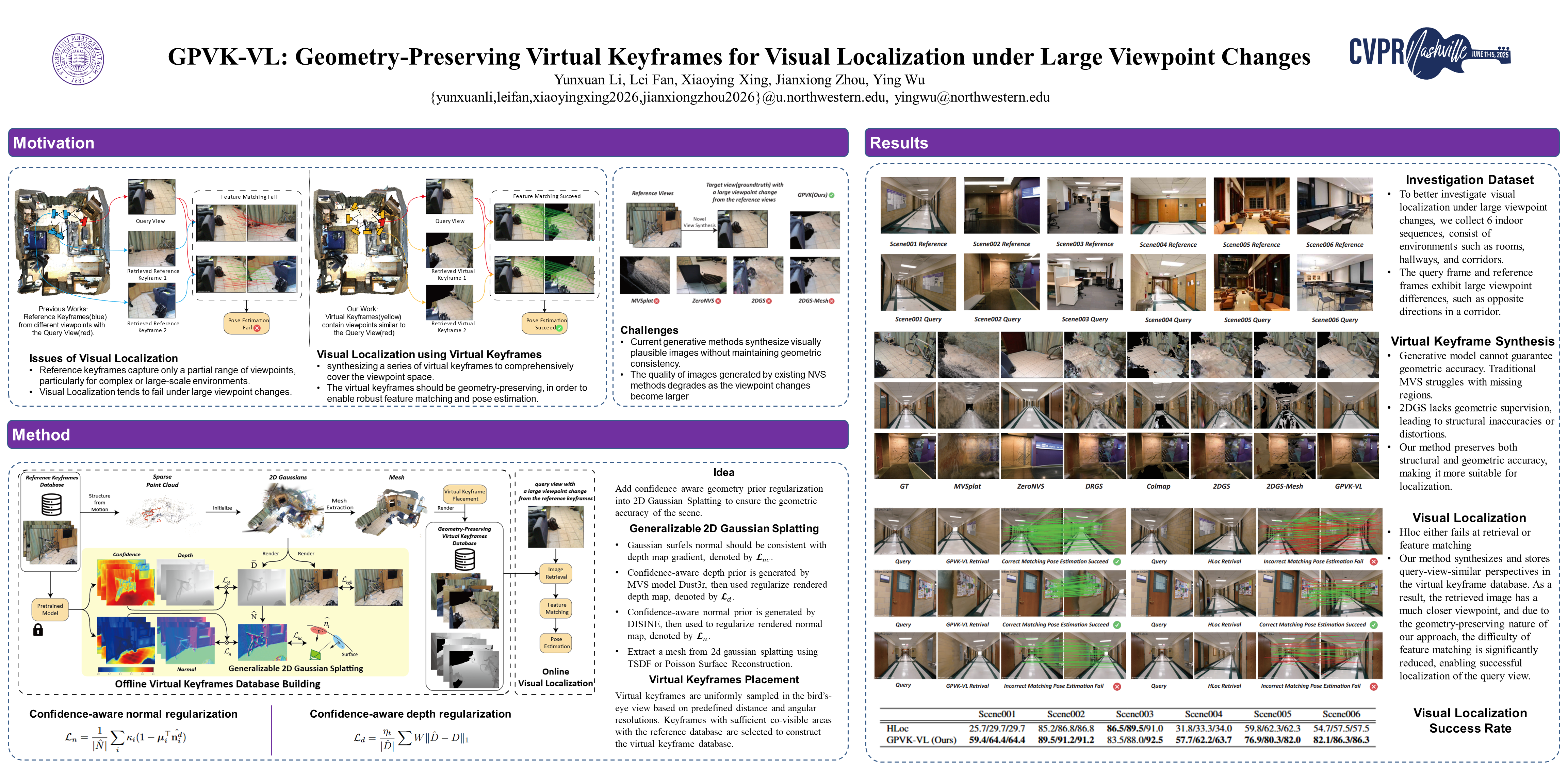
Abstract
Visual localization, the task of determining the position and orientation of a camera, typically involves three core components: offline construction of a keyframe database, efficient online keyframes retrieval, and robust local feature matching. However, significant challenges arise when there are large viewpoint disparities between the query view and the database, such as attempting localization in a corridor previously build from an opposing direction. Intuitively, this issue can be addressed by synthesizing a set of virtual keyframes that cover all viewpoints. However, existing methods for synthesizing novel views to assist localization often fail to ensure geometric accuracy under large viewpoint changes. In this paper, we introduce a confidence-aware geometric prior into 2D Gaussian splatting to ensure the geometric accuracy of the scene. Then we can render novel views through the mesh with clear structures and accurate geometry, even under significant viewpoint changes, enabling the synthesis of a comprehensive set of virtual keyframes. Incorporating this geometry-preserving virtual keyframe database into the localization pipeline significantly enhances the robustness of visual localization.