Reloc3r: Large-Scale Training of Relative Camera Pose Regression for Generalizable, Fast, and Accurate Visual Localization
{kind=link}
Abstract
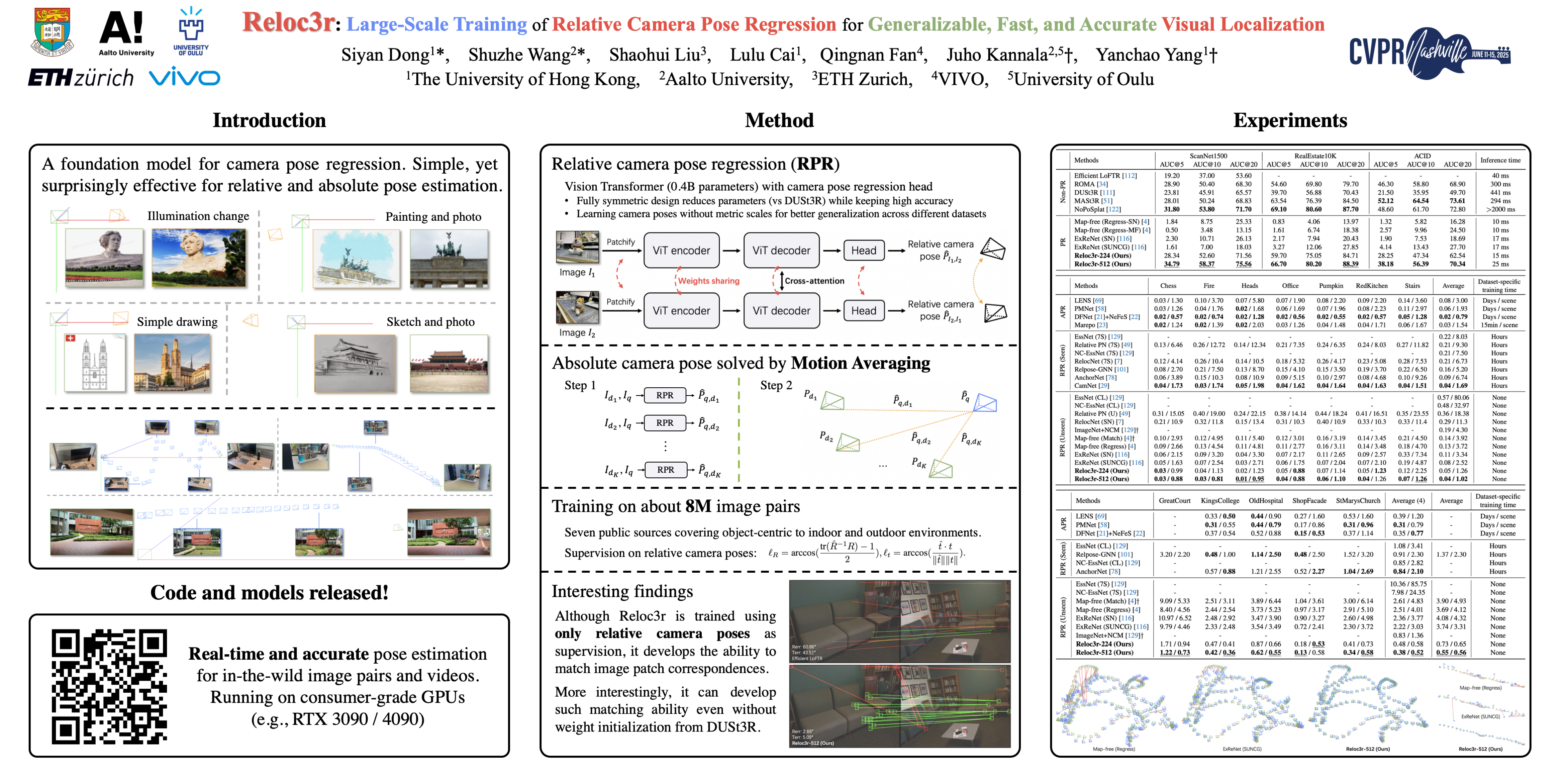
Visual localization aims to determine the camera pose of a query image relative to a database of posed images. In recent years, deep neural networks that directly regress camera poses have gained popularity due to their fast inference capabilities. However, existing methods struggle to either generalize well to new scenes or provide accurate camera pose estimates. To address these issues, we present Reloc3r, a simple yet effective visual localization framework. It consists of an elegantly designed relative pose regression network, and a minimalist motion averaging module for absolute pose estimation. Trained on approximately 8 million posed image pairs, Reloc3r achieves surprisingly good performance and generalization ability. We conduct extensive experiments on 6 public datasets, consistently demonstrating the effectiveness and efficiency of the proposed method. It provides high-quality camera pose estimates in real time and generalizes to novel scenes. Upon acceptance, we will make our code and training data publicly available.